April 2012 – Three screenprints made with an analog swarm of 21 bristle bots.
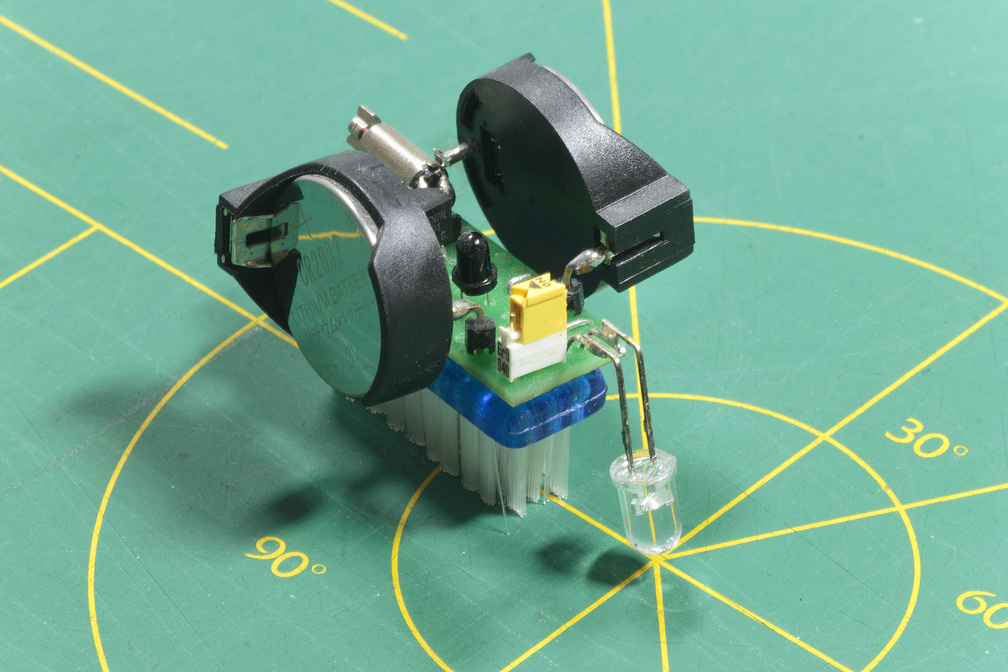
May 2011 – Our first prototype of a light sensing vibrobot.